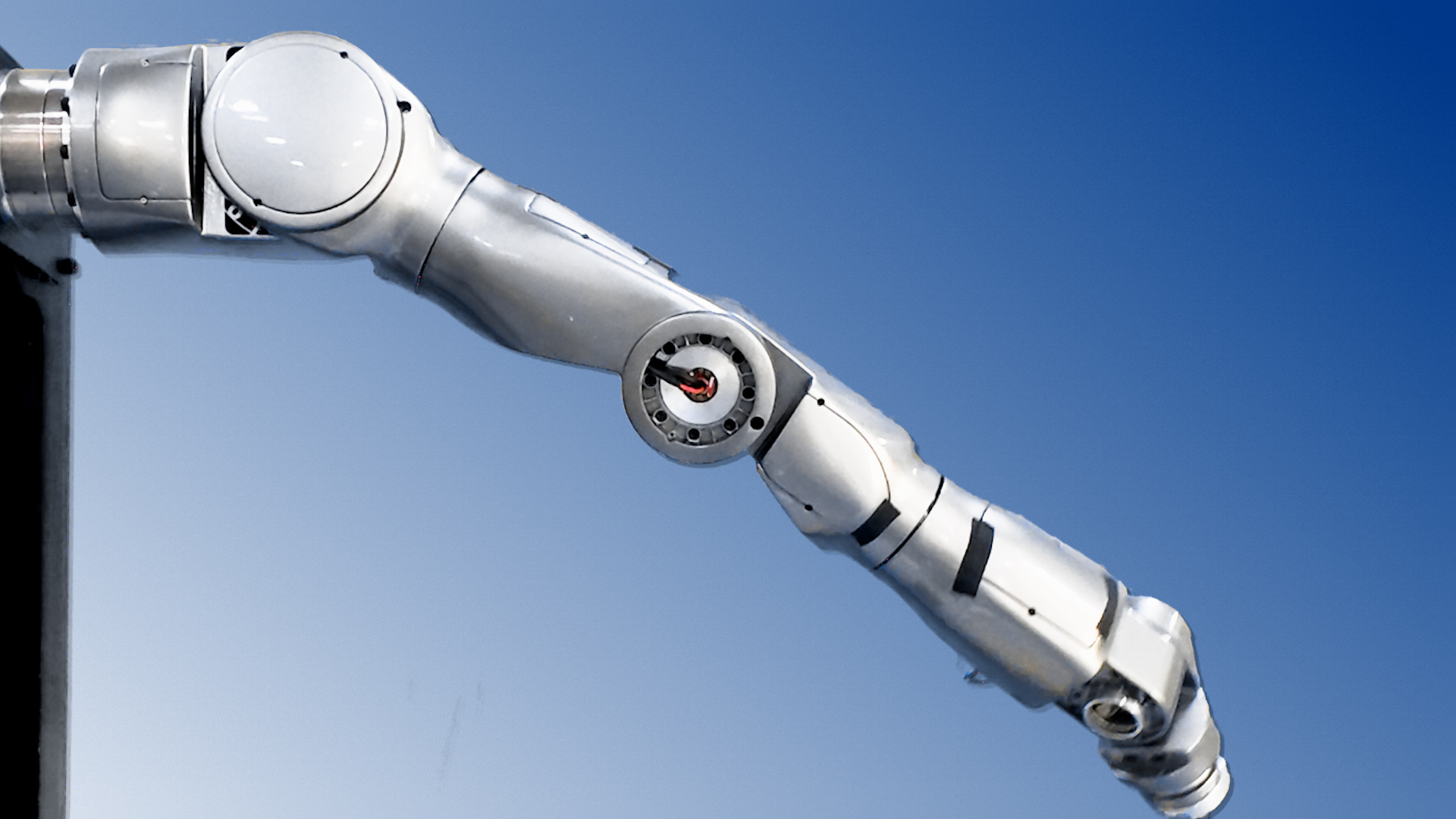
人形機械臂覆蓋多檔負載規格,具備卓越的模塊化架構與軟硬件開放接口,全面支持二次開發與深度定制。 其結構設計高度仿生,深度融合人體工學與生物力學原理,在運動自由度、關節排列及力控反饋等方面精準復現人類上肢行為模式。 可實現高精度、高響應的人形操作體驗。其開放性與可拓展性,為構建多場景、多模態的人形機器人系統奠定堅實本體基礎。